


滚动轴承故障诊断
一、论文基础信息
- 论文标题:A Rolling Bearing Fault Diagnosis Method Based on Multimodal Knowledge Graph
- 期刊:IEEE Transactions on Industrial Informatics
- 发表时间:2024年11月
- 核心方法:多模态知识图谱MKG + 关系级联图注意力网络RCGAT + 卷积嵌入ConvE
- 数据集:7个公开轴承数据集(CWRU、DIRG、MFTP、Ottawa、FEMTO-ST、IMS、XTJU-sy)
二、论文要解决的问题
- 传统故障诊断把复合故障当成独立新标签,忽略故障之间的关联关系。
- 多数知识图谱只用到文本数据,没直接用传感器的振动信号、频谱等多模态数据。
- 传统图模型只考虑一阶邻居,不区分多阶邻居重要性,容易信息过度平滑。
- 知识图谱大多只做可视化/检索,没用于推理式故障诊断。
三、整体思路
把轴承故障诊断转化为多模态知识图谱补全任务:
先从振动信号、频谱、文本描述构建多模态知识图谱,再用RCGAT学习图结构与故障关系,最后用ConvE打分预测故障类型。
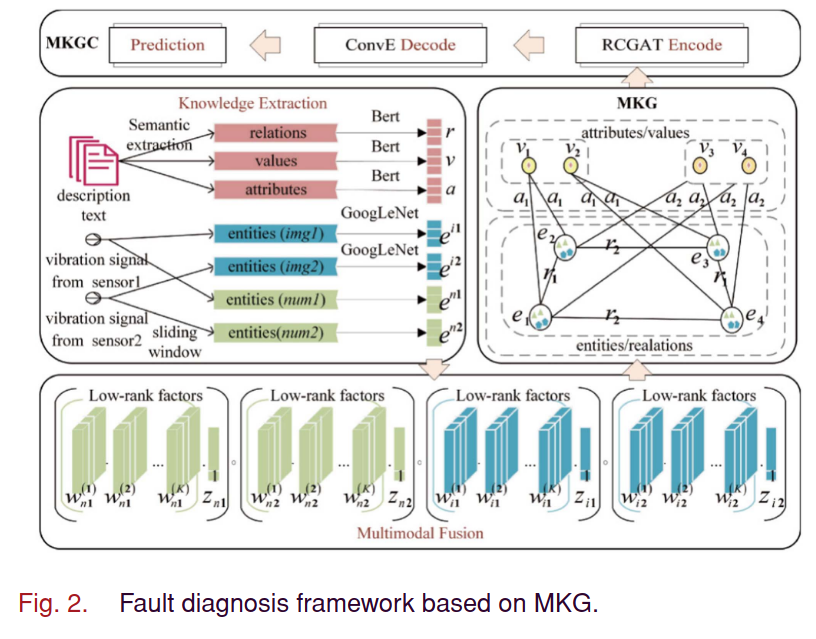
四、方法总流程
- 多模态知识图谱MKG构建
- 多模态特征融合(LMF)
- RCGAT编码(学习节点与邻居信息)
- ConvE解码(打分预测故障)
- 故障诊断输出
五、详细模型与步骤
1. 多模态知识图谱 MKG 构建
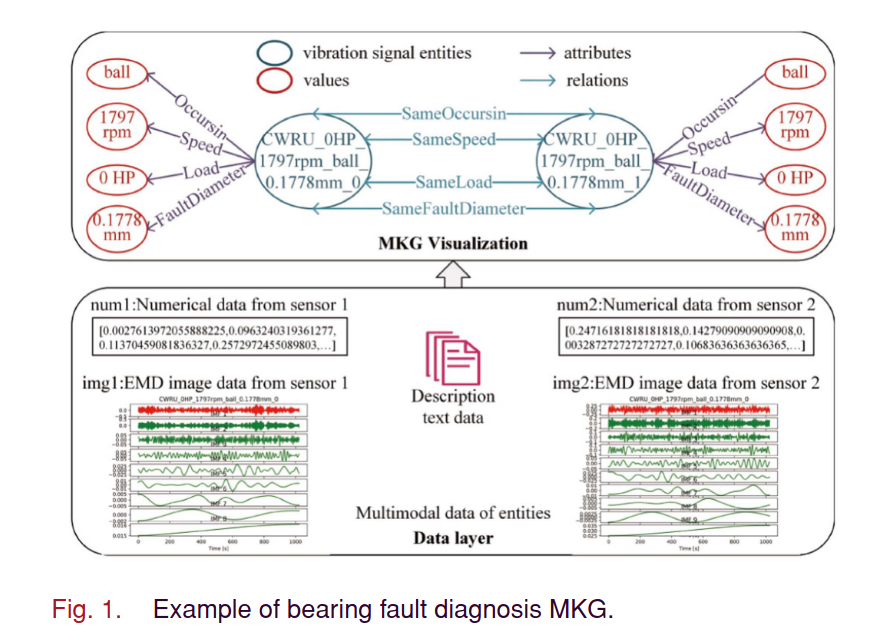
- 节点
- 实体:滑动窗口截取的振动信号段(时序数值 + 频谱图)
- 值:故障类型、转速、负载、故障直径等
- 边
- 属性边:信号 → 故障/转速/直径(属于、发生在、大小为)
- 关系边:信号 ↔ 信号(同故障、同转速、同直径)
- 三元组形式
- (实体, 关系, 实体)
- (实体, 属性, 值)
- 数据来源:振动时序、EMD频谱图、数据集文本描述
2. 多模态融合 LMF(低秩多模态融合)
- 输入模态:数值时序、频谱图(GoogLeNet)、文本(BERT)
- 作用:把多模态信息压成一个节点初始向量
- 特点:避免张量爆炸,计算高效
3. RCGAT 编码器(核心)
全称:关系级联图注意力网络
作用:给每个节点融合自身特征 + 邻居信息 + 多阶邻居信息
- ① 节点级注意力
每层内对不同邻居分配权重,关系不同权重不同。 - ② 层级注意力
堆叠多层得到1阶、2阶邻居信息,自动给各层加权,防止过平滑。 - ③ 输出
每个节点的最终嵌入向量(含全图结构信息)
关键点:
RCGAT不区分实体/属性,一律当作节点与边统一计算。
4. ConvE 解码器(打分器)
作用:给定(信号实体,关系,?),预测最可能的故障。
- 输入
- 头实体向量 h(RCGAT输出)
- 关系向量 r(如“故障位置是”)
- 步骤
- h 与 r 拼接
- reshape 成2D矩阵(不是图片,只是数字方块)
- 卷积提取交互特征
- 压平为向量
- 与所有故障实体计算匹配分数
- 输出
所有故障的置信度分数,最高分即为诊断结果
六、训练与预测的关键区别
训练
- 知识图谱完整,故障已知
- 模型学习:信号 → 故障的规律
预测(新未知信号)
- 新信号 → 切窗 → 多模态 → 初始向量
- 连入旧图谱(只连信号–信号边)
- RCGAT计算新节点向量
- ConvE输入(新向量,关系)→ 打分输出故障
七、创新点
- 首次直接用振动信号构建多模态知识图谱做故障诊断。
- 用RCGAT双注意力捕捉多阶邻居与关系依赖。
- 把故障诊断转为知识图谱补全,可推理复合故障。
- 多模态融合比单一模态精度更高。
八、实验结论
- 在7个轴承数据集上优于TransE、DisMult、ConvE、RGCN、RGAT
- 三元组分类准确率 >99%
- 鲁棒性强,适合复合故障、少样本场景
